EXOrem – Exoskelette mit redundanten Elektromotoren
Laufzeit: 02.2025 – 01.2025
Schlagwörter: Medizintechnik, Aktives Exoskelett, Elektromotor
Der vom Bundesministerium für Wirtschaft und Klimaschutz beliehene Projektträger ist die AiF Projekt GmbH.
Durch eine gezielte Optimierung batteriebetriebener Antriebe können signifikante Verbesserungen von aktiven Orthesen/Exoskelette realisiert werden. Dabei steht die Steigerung der Leistungsdichte, Dynamik und Sicherheit im Fokus. Zur Erreichung der Anforderungen soll ein Motor mit einem speziellen zweikanaligen Aufbau mit einem miniaturisierten Rückführsystem erforscht werden. Ein Funktionsmuster des Motors soll mithilfe eines Prüfstands verifiziert und am Anwendungsfall einer aktiven Knieorthese realitätsnah getestet werden. Zur Realisierung des Projekts koorperiert das Zentrum für Zuverlässige Mechatronische Systeme der Hochschule Aalen mit der Elektromotoren Fischer GmbH.
Ziel des FuE-Teilprojektes der Hochschule Aalen ist die Evaluierung eines sicheren sowie bauraumoptimierten Rückführsystems und die Entwicklung des Regelungskonzeptes für den elektrischen Motor. Außerdem erfolgt die Entwicklung des Prüfstandes für die Verifizierung des Motors. Den Abschluss des Teilprojektes bildet die Integration des Motors in eine aktive Knieorthese und die Validierung des Systems mithilfe eines Beinsimulators.


ARKOPY – Autonomous Robotic Knee Orthosis for Training and Therapy
Laufzeit: 08.2022 - 08.2024
Schlagwörter: Medizintechnik, Aktives Exoskelett, Künstliche Intelligenz, Leichtbau
Der vom Ministerium für Wirtschaft, Arbeit und Tourismus Baden-Württemberg beliehene Projektträger ist die VDI/VDE Innovation + Technik GmbH.
Mobilität ist die Grundlage für ein aktives und selbstbestimmtes Leben. Der starken Zunahme körperlicher Einschränkungen, in Folge neurologischer Schäden durch Schlaganfälle und Herzinfarkte, kann mit innovativen robotischen Behandlungsmethoden, in Form aktiver Exoskelette, begegnet werden. Dabei bestimmen die Parameter Gewicht, Unterstützungsgrad und Nutzungsdauer die Effektivität von Exoskeletten bei der Therapie. Bei Rehakliniken besteht ein großes Interesse an besonders leichten und gleichzeitig leistungsstarken Hilfsmitteln. Ziel des beantragten Projekts ist eine aktive Knieorthese mit einem neuartigen innovativen Leichtbauaktuator und einer KI basierten Regelung zur optimalen Adaptierung an unterschiedlichste Nutzer und Aktivitäten. Zur Verifikation des Funktionsdemonstrators wird ein spezieller Beinsimulator entwickelt. Damit können unterschiedliche Aktivitäten realitätsnah abgebildet, und so die Regelungsalgorithmen optimiert und die Leistungsfähigkeit nachgewiesen werden. Schlüssel zur Erreichung dieses ambitionierten Ziels ist ein neuartiger biomimetischer Kniegelenkantrieb, der durch die Verwendung von hochfesten Seilen und speziell geformten Umlenkrollen für eine winkelabhängige Kraftübersetzung den Eigenschaften des menschlichen Kniegelenks nahekommt. Darüber hinaus wird ein intelligenter, auf Machine-Learning basierender, Unterstützungsalgorithmus entwickelt. Dieser soll eine optimale Unterstützung der Benutzer bei den unterschiedlichen Aktivitäten sicherstellen. Zur Realisierung des Projekts kooperiert die Advanced Mechatronics GmbH, als Spezialist für sichere Elektronik und Medizintechnik, mit dem Zentrum für Zuverlässige Mechatronische Systeme der Hochschule Aalen. Der entwickelte Funktionsdemonstrator wird am Ende des Projekts an der Rehaklinik Zihlschlacht durch eine technische Erprobung validiert. Die Industrialisierung der Ergebnisse erfolgt nach Projektabschluss durch Advanced Mechatronics.

Gefördert durch

im Programm

Cyber-physische Antriebsmodule für maritime Anwendungen
Das Forschungsprojekt CHARISMA verfolgt die Erforschung und Entwicklung von intelligenten, hochintegrierten, digitalen, mechatronischen Antriebsmodulen, die als cyber-physische Systeme in der Meerestechnik eingesetzt werden können.
Zielsetzung:
- Erforschung eines geeigneten Prognostics and Health Management Konzepts zur Steigerung der Verfügbarkeit der Module
- Erforschung und Entwicklung von geeigneten Motor,- Sensor- und Elektronikmodulen
- Erforschung und Einsatz von neuartigen Materialien für die maritime Anwendung
- Integration von Industrie 4.0 kompatiblen Schnittstellen und Protokolle
- Die Module sollen in unterschiedlichsten Systemarchitekturen (zentrale / dezentrale Applikation) eingesetzt werden können
- Entwicklung von fehlertoleranten Kleinspannungsmotoren (bis 400 W) mit hohem Drehmoment und weitem Feldschwächbereich
- Erforschung und Entwicklung einer neuartigen Sensortechnik
- Integration der Module in einen Linearaktuator mit anschließender Validierung
Hardware integrated Motion Controller and Battery Management for high efficiency motor operation
Das Teilvorhaben HIMB zum Forschungsprojekt MIMIC (Miniaturized Integrated Motion Controller) zielt auf die Entwicklung eines hocheffizienten Antriebsmoduls (Miniaturized Integrated Motion Controller: Mimic) für permanenterregte Synchronmaschinen mit integriertem Energiespeicher und Umrichter für die Anwendung in der Industrie, Medizin-, Prozess- und Meerestechnik ab.
Funktionen des Antriebsmoduls:
- Energiespeicher
- Umrichter
- Steuerungslogik
- Kommunikation mit digitalisierten Produktionssystemen
Active Lower Limb Exoskeleton
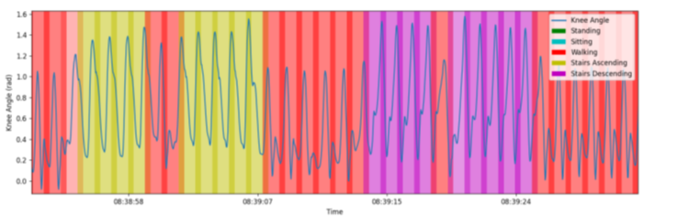
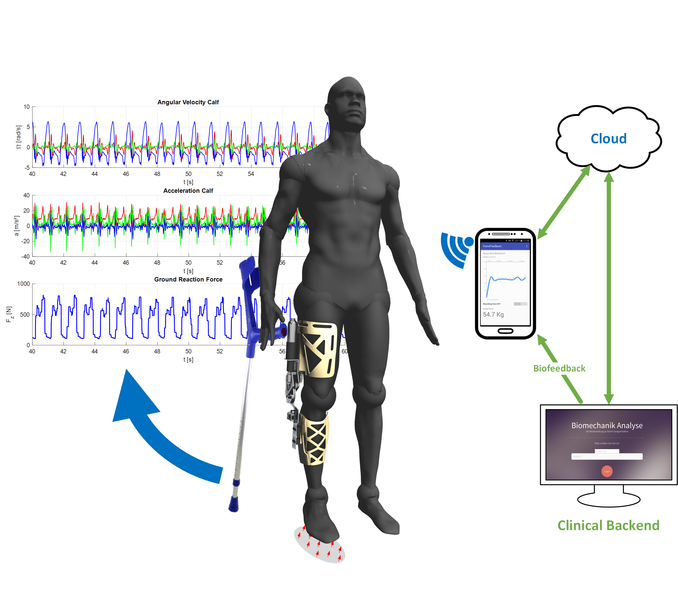
Das Forschungsprojekt zielt auf eine Vollunterstützung der unteren Extremitäten zu Rehabilitationszwecken im Falle von Unfällen, Muskelerkrankungen oder Teillähmungen ab. Als Medizinprodukt werden besondere Anforderungen in Bezug auf Sicherheit und eine validierte Funktionsweise gestellt. Um die Unterstützung zu gewährleisten wird eine zuverlässige Regelung, basierend auf biomechanischen Sensordaten verwendet.
Ziele des Systems sind:
- Unterstützung bei Kraft und Geschwindigkeit bei minimalem Gewicht
- Adaptive Regelung durch cloudbasiertes Datenhandling
- Schnellere und personalisierte Rehabilitation durch Mobile Health Funktionalität
Active Lower Limb Exoskeleton
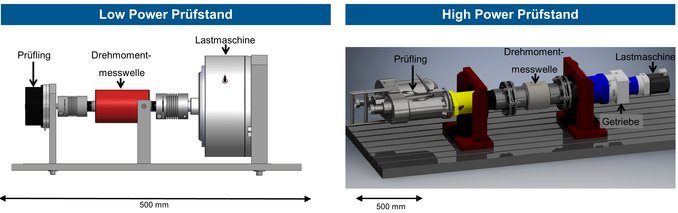
Im Teilbereich MagNetz des hochschulweiten Forschungsprojekts SmartPro übernimmt das Zentrum für Zuverlässige Mechatronische Systeme die Qualifizierung von elektrischen Antrieben, welche mit modernsten Magnetmaterialien modifiziert wurden. Der Fokus liegt neben dem Wirkungsgrad auf deren thermischen und magnetischen Verhalten. Hierzu werden Prüfstände für Motoren unterschiedlichster Leistungsgrößen konzipiert und realisiert. Aufgrund des Nutzens der Prüfstände als hochgenaue Messgeräte, wird ein besonderer Fokus auf die Validierung der Messungen gelegt. Die Prüfstände finden Ihre Anwendung in:
- 4 Quadranten Lastsimulationen (z.B. Pumpen, Ventile, Ventilatoren)
- Ermittlung von thermischen Übergangswiderständen
- Verifikation von unterschiedlichen Kommutierungsverfahren (Sinus-Dreieck, SVM, Flat-Top) durch Rapid Prototyping Umgebung
- Prognose der Lebensdauer
Mag Netz
Smart Available Maritime Battery
Im Rahmen des Forschungsprojekts wird eine innovative, modulare skalierbare Energieversorgung für Verbraucher im Bereich Unterwassertechnologie entwickelt. Die Unterwasser-Energieversorgung erlaubt den Betrieb von verschiedenen Verbrauchern an einem vorhandenen Versorgungsnetz, da die Verbraucher direkt aus der Energieversorgung gespeist werden und das Versorgungsnetz nur zum Nachladen der Energieversorgung benötigt wird. Dies soll für eine Lebensdauer von 25 Jahren erreicht werden.
ISSA (Intelligent Safe Subsea Actuation)