Lernmodule
Hier sehen Sie eine Übersicht über die mechatronischen Lernmodule, die von interessierten Studenten jederzeit nach Anmeldung absolviert werden können.
Die Anmeldung und Terminabstimmung erfolgt in Rücksprache mit Rainer Abele.
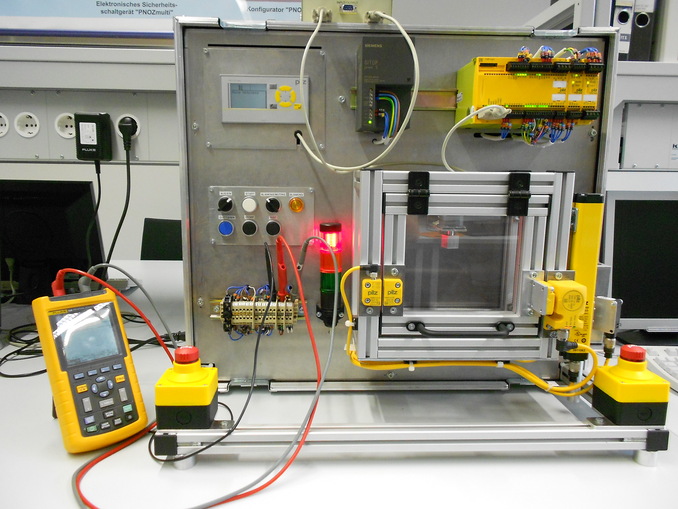
Lernmodul PNOZ
In diesem Lernmodul werden verschiedene Möglichkeiten zur Absicherung einer Werkzeugmaschine / Fräsmaschine den Studenten nähergebracht. Über das Sicherheitsschaltgerät PNOZmulti m1p der Firma PILZ GmbH & Co. KG, werden alle Absicherungen zusammengefasst. Auf einfache Weise wird mit Hilfe des PNOZmulti Configurators am PC ein Programm konfiguriert und auf das Sicherheitsschaltgerät gespielt. Anschließend werden die Wirkungsweise des Lichtvorhanges, der Türabsicherung und die Funktion des Not-Aus getestet. Mit dem Oszilloskop können die Überwachungssignale der Not-Aus-Überwachung sichtbar gemacht werden.
Für dieses Modul werden keine Grundkenntnisse und Vorlesungen vorausgesetzt.
Lernziele:
- Grundverständnis zur Sicherheitsabschaltung von Maschinen
- Wirkungsweise von verschiedenen Sicherheitseinrichtungen
- Handhabung des Oszilloskop
Tätigkeiten:
- Konfiguration der Schaltung am PC
- Übertragung des Programmes auf das Sicherheitsschaltgerät
- Inbetriebnahme der Anlage
- Überprüfung der verschiedenen Sicherheitseinrichtungen
- Messung und Einstellung des Oszilloskops

Lernmodul CAN-Bus
Der CAN–BUS ist heute und auch noch in naher Zukunft das am häufigsten eingesetzte Informationsübertragungssystem im Bereich Automobil und Nutzfahrzeuge. Um die Grundlagen des CAN–Netzwerksystems kennen zu lernen, steht motivierten StudentInnen dieses Lernmodul zur Verfügung.
Der Schwerpunkt des Lernmoduls liegt darüber hinaus in der Vertiefung der Kenntnisse der modellbasierten Softwareentwicklung mit Matlab/Stateflow und dem Codegenerator RealTime-Workshop.
Die entwickelte Hardware bietet Möglichkeiten, die Kommunikation zwischen zwei Steuergeräten genauer zu untersuchen. Im Zuge des Lernmoduls wird ein eigenes Modell zu Sende- und Empfangsknoten entwickelt, eigenständig auf den Mikrocontroller Atmel AT89C51CC03 geladen und die Funktion überprüft. Zur Vorbereitung auf die Veranstaltung wird ein umfassendes Handout zum Selbststudium bereitgestellt.
Empfohlene Lehrveranstaltungen:
- Embedded Control Systems
- Workshop zur modellbasierten Codeentwicklung
Vorausgesetzte Grundkenntnisse:
- Matlab/Simulink
- KEIL µVision
Lernziele:
- Grundkenntnisse über den CAN BUS
- Vertiefung der Kenntnisse in der modellbasierten Codeentwicklung: a) Zustandsgraphen nach David Harel, b) Erweiterung des Zustandsgraphen um Timer-Funktion
- Grundkenntnisse über Eingebettete Systeme
Tätigkeiten:
- Messungen am BUS mit Oszilloskop und CAN-Analyser
- Entwurf des Zustandsgraphen eines Lichtsteuergerätes mit Timer-Funktion (Blinker) in Stateflow
- Simulation mit Matlab/Simulink
- Codegenerierung aus dem Modell mit Realtime Workshop Embedded Coder
- Erstellen eines Softwareprojektes mit Keil µVision

DC-Motor
In diesem Lernmodul geht es um die Steuerung und Regelung eines 1-Achsantriebsstranges mit DC-Getriebemotor, Schaltkupplung und Schwungmasse. Die Steuerung und Regelung des Aufbaues erfolgt über Matlab-Simulink R2017b unter Einsatz von „Simulink Desktop Real-Time“ auf dem HOST-PC. Über ein Arduino ATmega Mikrocontrollerboard werden die Signale über die USB-Schnittstelle an den HOST-PC und umgekehrt transportiert.
Im Lernmodul steht das Verständnis von „Steuerung“ und „Regelung“ eines Antriebssystems mit DC-Motoren, sowie die wichtigsten Eigenschaften eines einschleifigen Regelkreises im Vordergrund (u.a. Wind-up Effekt bei Stellgrössenbeschränkung, Stabilitätsanalyse, Reglersyntheseverfahren, Einfluß der Motorlast). Mit dem vorhandenen MiL-Systemmodell kann die Reglersynthese modellbasiert erfolgen und die Tools von Matlab-Simulink vorteilhaft eingesetzt werden. Für die fortgeschrittene Regelungstechnik lassen sich zudem Kaskadenregelungen der Drehzahl und der Winkellage realisieren.

Lernmodul Lorentzaktuator
In diesem Lernmodul soll Studenten die Steuerung- und Regelungstechnik näher gebracht werden. Es soll die vertikale Positionierung einer Masse mit einem Mikrocontroller als Regler realisiert werden. Mit Hilfe einer Feder kann eine zweite Masse angekoppelt werden. Es entsteht ein Aufbau mit schwingungsfähigen gekoppelten Massen. Ziel des Lernmoduls ist die exakte Positionierung der zweiten, oberen Masse durch einen selbst programmierten Regler. Der eingesetzte Aktuator arbeitet nach dem Prinzip der Lorentzkraft. Es findet keine Umsetzung von rotatorischer in translatorische Bewegung statt. Diese Aktuatoren sind den Tauchspulen in Lautsprechern ähnlich. Durch ihren rein elektromagnetischen Aufbau sind sie nahezu frei von Verschleiß, hoch dynamisch und linear.
Das Lernmodul soll Studenten ermöglichen, "rapid control prototyping" kennenzulernen. Es handelt sich um eine moderne, modell-basierte Entwicklungsmethode, die in der Industrie eingesetzt wird. Dabei wird der mechanische Aufbau inklusive Regler in einem Modell mit Matlab abgebildet. Durch Simulation und Reglereinstellverfahren werden geeignete Regelparameter ermittelt. Diese können dann mit Hilfe des Echtzeitcomputersystems xPC-Target am realen Aufbau getestet werden. Zum Schluss wird die Simulation mit dem realen Aufbau verglichen.
Empfohlene Lehrveranstaltungen:
- Regelungstechnik
- Embedded Control Systems
Grundkenntnisse:
- Matlab
- KEIL µVision
Lernziele:
- Grundverständnis für RPD mit Matlab und xPC-Target
- Grundlagen von Regelsystemena) Messung der Sprungantwortb) Bestimmung des Bode-Diagrammsc) Bestimmung der Regelgüten
- Verständnis für unterschiedliches Verhalten von Reglern (P und PI)
Tätigkeiten:
- Modellierung eines Systems mit Matlab Simulink
- Entwurf eines Reglers im Frequenzbereich
- Simulation mit Matlab Simulink
- Codegenerierung mit Matlab Realtime Workshop
- Programmierung des Echtzeitsystems Speedgoat
- Vergleich von Simulation und realem Antrieb

Zahnriemenachse
In diesem Lernmodul geht es um die horizontale Positionsregelung einer elastisch gekoppelten Lastmasse, welche über eine Zahnriemenachse und einen Synchronservomotor positioniert wird (sog. Servoantrieb). Der Synchronservomotor treibt hierzu über ein Getriebe und eine Klauenkupplung die Zahnriemenscheibe und damit den Zahnriemen an. An diesem Zahnriemen ist nun die Lastmasse über zwei Federn elastisch angebracht. Zudem kann über eine Wirbelstrombremse eine variable zusätzliche Dämpfung ins System gebracht.
Die Ansteuerung des Antriebs erfolgt über einen geeigneten Servoverstärker mit integrierter Regelbaugruppe. Die Steuerung und Regelung der Anlage erfolgt jedoch über die „Real-Time-Target-Machine“ von Speedgoat (sog. TARGET-PC) auf dieser das Echtzeitbetriebssystem „Simulink Real-Time“ von Mathworks ausgeführt wird. Über den HOST-PC mit Matlab-Simulink kann der Bediener die Simulation steuern, überwachen, sowie Mess- und Simulationsergebnisse aufzeichnen. Die Kommunikationsschnittstelle zwischen dem HOST-PC und dem TARGET-PC wird über die LANSchnittstelle durch eine Ethernet-Verbindung realisiert.
Im ersten Teil dieses Lernmoduls geht es darum, das reale System und das dazugehörige Systemmodell kennen zu lernen. Dazu wird die Echtzeitumgebung „Simulink Real-Time“ und sowie die „Real-Time-Target-Machine“ vorgestellt um einen vollständigen Überblick über das RCP-Verfahren („Rapid Control Prototyping“) zu erhalten. Mit einem kurzen Einstiegsversuch zum Einlesen, Filtern und Ausgeben eines Signals werden der Umgang sowie die Arbeitsweise mit Simulink Real-Time und der Echtzeitumgebung veranschaulicht.
Im Lernmodul sollen die Eigenschaften eines PID-Regelsystems unter Verwendung des Systemmodells simulativ und messtechnisch am realen Aufbau untersucht werden. Dazu werden beim PID-Regler die Einflüsse der einzelnen Parameter P, I und D sowie die Auswirkung des Filterkoeffizienten N untersucht. Bei der Arbeit am Systemmodell werden mit zwei verschiedenen Verfahren (Frequenzkennlinien-Verfahren und Simulink-Regler-Tuning-Tool) für die Inbetriebnahme der RCPPlattform geeignete Regelparameter ermittelt. Abschliessend werden die Regelergebnisse von PID-Regler und Kaskadenregler miteinander verglichen.
Durch den direkten Vergleich der Ergebnisse können auftretende Abweichungen von Simulation und Messung mit Hilfe der Matlab-Tools „Simulation Data Inspector“ dargestellt werden.
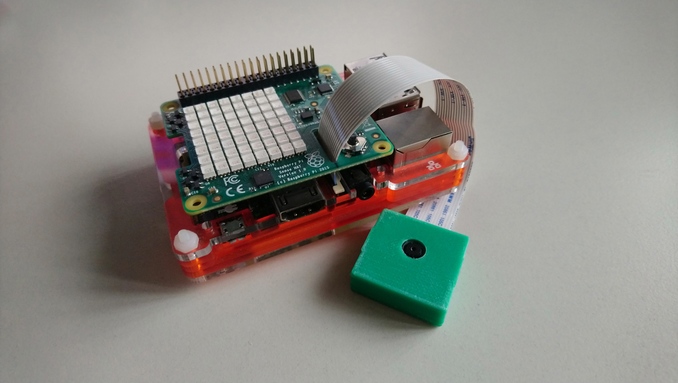
Raspberry Pi
Der Raspberry Pi ist ein beliebter Einplatinenrechner, der in der DIY-Szene (Do It Yourself -Szene) sehr populär geworden ist. Mittlerweile ist er nicht mehr nur im Consumer-Bereich, sondern auch im industriellen Umfeld zu finden. Die Firma Mathworks stellt ein Hardware Support Package für den Raspberry Pi zur Verfügung. Damit wird der Einsatz im Bereich der Mess-, Steuer- und Regelungstechnik möglich. Da der Raspberry Pi ein vollwertiger Computer mit Linux Betriebssystem ist, eignet er sich auch als Werkzeug zur Datenübertragung.
Das Hardware Support Package bietet Funktionsblöcke für den leichten Einsatz der Hardware-Schnittstellen des Raspberry Pi in Matlab Simulink. Es stehen auch Funktionsblöcke für das SenseHAT zur Verfügung. Die Sensoren des SenseHAT können Feuchtigkeit, Temperatur, Luftdruck und Bewegung erfassen. Darüber hinaus besteht die Möglichkeit zur Interaktion mit dem Benutzer über Joystick und 8x8-LED-Matrix. Die Bildverarbeitung wird durch Verwendung der PiCAM möglich. An einem konkreten Beispiel kann Einblick in die Grundlagen der Objekterkennung genommen werden.
Das Lernmodul bietet die Möglichkeit für den Einstieg in die modellbasierte Softwareentwicklung. Mit Hilfe der attraktiven Hardware kann der Studierende gleichzeitig den Einsatz in der Realität kennen lernen. Der automatisch generierte Code wird über die Netzwerkverbindung direkt auf den Raspberrry Pi übertragen. Im interaktiven Modus können Daten vom Raspberry Pi direkt am PC im Modell dargestellt werden.
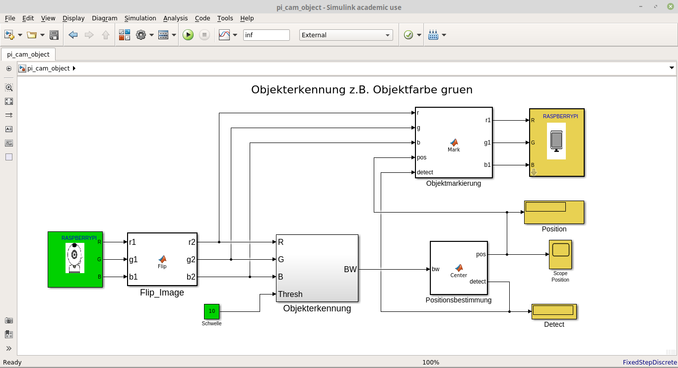
Pi Cam Object Simulink Academic Use
Lernziele:
- Einsatz des Raspberry Pi in der modellbasierten Softwareentwicklung
- Kennenlernen des Hardware Support Packages für den Raspberry Pi
- Einblick in die Messdatenerfassung mit Hilfe des SenseHAT.
- Codegenerierung für Embedded Hardware
- Vertiefung der externen Arbeistmodi
Tätigkeiten:
- Simulation mit Matlab Simulink
- Codegenerierung für den Raspberry Pi unter Verwendung des zugehörigen Hardware Support Packages
- Einsatz der Pi CAM
- Einsatz des SenseHAT