Elektronische Steuergeräte
Im Bereich der elektronischen Steuergeräte werden die Inhalte Programmierbare Logik, Mikrocontroller sowie Feldbussysteme behandelt.

Studierende mit Lernplattform in der Entwicklungsstufe 2
In diesem Bereich werden die Studierenden in die Programmierung von Mikrocontrollern mit A51 und C51 eingeführt. Dazu wird erlernt, wie Simulationen und Debugging durchgeführt werden.
Anschließend werden Steuerprogramme, Schaltwerke und Ablaufsteuerungen entworfen und realisiert.
Des Weiteren werden die Studierenden in die Modellbasierte Systementwicklung und die Programmierung von SPS mit FBS/FUP eingeführt.
Dazu steht ein modulares Steuergerätesystem zur Verfügung mit folgender Ausstattung:
Lernplattform mit angesteckten Erweiterungen
Basismodul Lernplattform:
- Digitale Ein- und Ausgänge
- Analoge Eingänge
- Schnittstellen: RS232, SPI-BUS, CAN-BUS
- Siebensegmentanzeigen
- DC-Motor mit Gabellichtschranken
Erweiterungsmodule:
- Schalterbaugruppe
- Zweizeiliges Text LCD
- Touch Grafik LCD
Controller-Module:
- 8Bit Mikrocontroller Atmel AT89C51CC01
- 32Bit Mikrocontroller Atmel AT97SAM7X128
Standalone-fähige Controller-Module:
- 8Bit Mikrocontroller Atmel AT89C51CC03
- Digitale Ein- und Ausgänge
- Analoge Ein- und Ausgänge
- Zählereingänge
- Schnittstellen: USB, SPI-BUS
- Siebensegmentanzeige
- Kompatibel zu Basismodul über Stiftleiste
- 32Bit Mikrocontroller STMicroeletronics STM32F103
- Digitale Ein- und Ausgänge
- Analoge Ein- und Ausgänge
- Zählereingänge
- PWM Ausgänge
- Schnittstellen: JTAG, USB, SPI-BUS, CAN-BUS
- Kompatibel zu Basismodul über Stiftleiste
Im Labor stehen 12 Arbeitsplätze mit folgender Ausstattung bereit:
- Digital-Oszilloskop
- Signalgenerator
- Multimeter
- Labornetzteil
Dazu stehen ein Logic Analyzer und 12 Rapid-Prototyping Plattformen vom Typ „Elvis“ zur Verfügung.
Im Bereich der Software stehen folgende Programme zur Verfügung:
- Entwicklungsumgebung Keil µVision
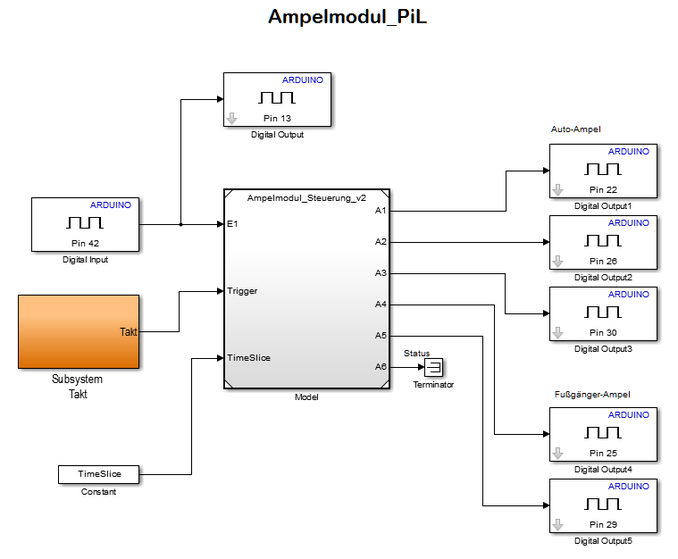
- Modellbasierte Softwareentwicklung mit The Mathworks Matlab/Simulink, Stateflow und den Codegeneratoren The Mathworks Realtime Workshop (Embedded Coder) und dSPACE TargetLink

Die Physical-Computing-Plattform Arduino ist ein Open Source Projekt. Die Kombination aus günstiger Hardware, einfacher Programmierumgebung und großer Anzahl von frei zugänglichen Softwarequellen ermöglicht einen leichten Einstieg in die hardwarenahe Programmierung.
Der Arduino wird in einer vereinfachten C bzw. C++ - ähnlichen Programmiersprache programmiert. Es steht eine große Anzahl von Hardware-Erweiterungen (i.e. Shields) zur Verfügung. Damit eignet sich der Arduino auch für Anwendungen im Bereich von IOT.
Bibliotheken zu Hardware-Erweiterungen lassen sich leicht in die IDE integrieren. Viele Bibliotheken werden zusammen mit Programmierbeispielen geliefert, die nach der Installation der Bibliothek in der Entwicklungsumgebung zur Verfügung stehen.
Es gibt mittlerweile eine große Anzahl von Arduino-Varianten. Alle werden über die gleiche Entwicklungsumgebung programmiert.
Das typische Arduino-Board basiert auf einem Atmel-AVR-Controller aus der megaAVR-Serie, wie dem ATmega328 (Link).
MATLAB Simulink bietet ein Hardware Support Package für den Arduino an. Dadurch wird eine einfache Nutzung externer Hardware, im Rahmen der Modellbasierten Systementwicklung möglich.
Hardwarespezifikation:
- Microcontroller: ATmega328P
- Operating Voltage: 5V
- Input Voltage (recommended): 7-12V
- Input Voltage (limit): 6-20V
- Digital I/O Pins: 14 (of which 6 provide PWM output)
- PWM Digital I/O Pins: 6
- Analog Input Pins: 6
- DC Current per I/O Pin: 20 mA
- DC Current for 3.3V Pin: 50 mA
- Flash Memory: 32 KB (ATmega328P) of which 0.5 KB used by bootloader
- SRAM: 2 KB (ATmega328P)
- EEPROM: 1 KB (ATmega328P)
- Clock Speed: 16 MHz
- LED_BUILTIN: 13
- Length: 68.6 mm
- Width: 53.4 mm
- Weight: 25 g
- Price: ~ 20 €

- Informationen zur Hardware
- ARM Cortex-A53
- 1,2 GHz
- 64-Bit - Architektur
- Bluetooth
- WLAN
- 1 GB Hauptspeicher
- 4 Kerne
- GPIO erlaubt die Interaktion mit der realen Welt
- HAT erweitert das System um beliebige Schnittstellen
- Informationen zum Einsatz
- Vollwertiges Betriebssystem: Linux (Raspbian)
- Softwareentwicklung direkt auf dem Gerät
- Steuergerät für das Automotiv Fahrzeugmodell
- Studienobjekt begleitend zur Vorlesung
- Hardwareprojekte, leicht realisierbar durch Bibliotheken für Python und C
- Hardware Support Package von Matlab Simulink
- Hardwareerweiterung für den PC
- Modellbasierte Software Entwicklung
- Automatische Codegenerierung
- Parameterübertragung auch während des Betriebs auf der Hardware (HiL)

- Informationen zur Hardware
- Mikroprozessor STM32F429
- 180 MHz
- 32-Bit - Architektur
- Programmierung in C mit Keil µVision und CubeMX
- Schnittstellen
- ADC
- DAC
- GPIO
- I2C
- Timers
- USART
- 40-polige Systemschnittstelle
- Informationen zum Einsatz
- Softwareentwicklung im High End Bereich
- Steuergerät für Trajektorie
- Bildverarbeitung
- Display mit Touch
- Autonomes Fahren
- Modellbasierte Software Entwicklung mit Matlab Simulink
- Hardware Erweiterung durch Matlab Support Package
- 40-polige Systemschnittstelle erlaubt Anbindung an Projekte des Studienganges
- Lernplattform
- Automotive Fahrzeugmodell (bis Gen 4)
- Softwareentwicklung im High End Bereich