Die Ausstattung des Labors für Robotik und virtuelle Systeme umfasst neben den 4 - bis 6-achsigen Industrierobotern, einen 3D-Scanner und ein immersives 3D-Projektionssystem. Alsbald wird es auch einen 3D-Drucker geben, um rasch vom virtuellen zum realen Objekt zu kommen.
Um Ihnen einen Vorgeschmack auf unser Labor zu geben, können Sie sich in unserer 360° Ansicht das Labor bequem von Zuhause aus anschauen. Fahren Sie hierzu einfach mit gedrückter linker Maustaste in die Richtung, in die Sie schauen möchten.
Historie zum Labor für Robotik und virtuelle Systeme

Prof. Dietmar Schmid(rechts) mit Ministerpräsident Erwin Teufel, 2003
Das Labor für Robotik und virtuelle Systeme wurde von Prof. Dr.-Ing. Dietmar Schmid eingerichtet. Prof. Schmid war von 1972 bis 2006 Hochschullehrer für Automatisierungstechnik, Robotik und virtuelle Systeme an der FH-Aalen, im Fachbereich Fertigungstechnik-Maschinenbau.
Die Roboteraktivitäten begannen zunächst mit einfachen Simulationen zur Kinematik. 1977 erfolgte die Beschaffung eines ersten bahngesteuerten Industrie-Roboters (ASEA IRb6), finanziert durch die Carl Schneider-Stiftung, Aalen. In schneller Folge wuchs die Roboterpopulation mit unterschiedlicher Kinematik und Herkunft, auch auf Grund von mehreren BMBF-Forschungsprojekten. Hinzu kamen bereits in den 70er Jahren Systeme zur Bildverarbeitung und Sprachverarbeitung mit Anwendungen bei industriellen Automatisierungssystemen, auch in Verbindung mit Robotern. Es folgten Ende der 80er Jahre Roboter-Programmier- und Simulationssysteme. Mit dem Neubau eines Labors wurde 1991 das Labor für „Robotik und virtuelle Systeme“ als eine einzigartige Forschungsstätte im Bereich der Fachhochschulen durch das Land Baden-Württemberg eingerichtet. Erstmals wurden damit, zusammen mit der Gießereitechnik, auch Laborflächen zum Zweck der Forschung den Fachhochschulen in Baden-Württemberg zugestanden. Die 90er Jahre waren geprägt von einem EU-Verbundprojekt zur Bauteiluntersuchung mit Wärmebildverarbeitung, BMBF-Verbundprojekten zur Roboternutzung als Werkzeuge in Werkstätten sowie einer Reihe einzelner Forschungsprojekte. Zur Jahrtausendwende wurde dann das Labor umgestaltet und zur Fernnutzung für Studierende ausgebaut. So konnten Studierende auch aus anderen Hochschulen Laborversuche via Internet in Aalen durchführen. Das Angebot und die Nutzung waren weltweit. Mit der Einrichtung einer immersiven 3D-Plattform und unterschiedlicher 3D-Scannern war es ab dem Jahr 2000 schließlich möglich reale Prozesse mit virtuellen Szenen zu mischen (Mixed Reality). So gab es, in natürlicher Größe, mal die Roboter virtuell und die Bauteile real oder die Werker waren real und die Roboter virtuell.
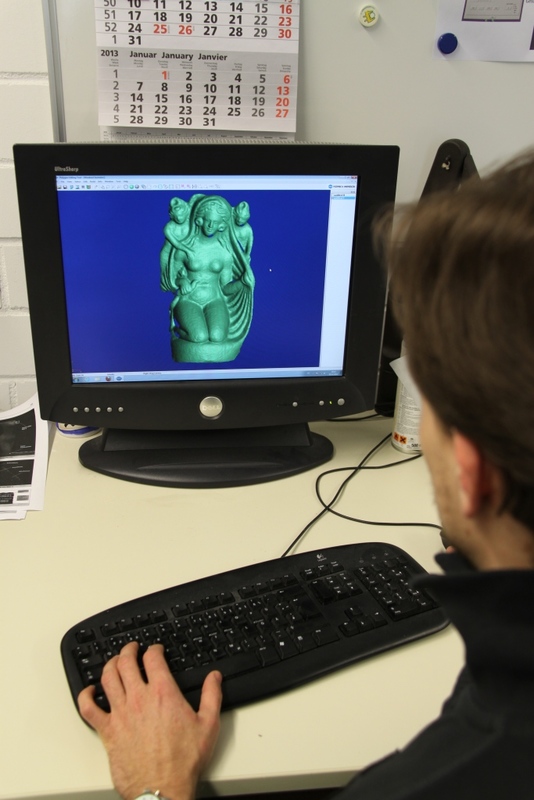
Neben den industriellen Anwendungen gab es vielfältige Versuche den modernen Maschinen- und Computerpark auch in „fremden Bereichen“ zum Einsatz zu bringen. Das ergab sich vor allem aus der sehr fruchtbaren Zusammenarbeit mit Prof. Dr. Klein auf dem Gebiet der Computertomographie (CT). Die CT einerseits und der laboreigene 3D-Scanner andererseits lieferten die 3D-Daten sowohl für die immersive 3D-Projektionsplattform als auch zur Materialisierung von Objekten aller Art mit den Robotern als Bearbeitungsgeräte oder mit den Methoden der Additiven Fertigung bei Prof. Dr. Berger. Zusammen mit mehreren Museen, mit der Akademie für Bildende Kunst in Stuttgart, mit der FH für Gestaltung in Schw. Gmünd u. a. konnten in vielfältiger Weise archäologische Repliken, Designstudien und künstlerische Skulpturen visualisiert, animiert und hergestellt werden. Keltische Kultszenarien wurden in theatralischer Form auf der immersiven 3D-Plattform inszeniert.
Neben vielen Fachpublikationen, Fachvorträgen und regelmäßigen Teilnahmen als Aussteller auf Messen gab es vom Labor für Robotik und virtuelle Systeme eine weitreichende allgemeine Medienpräsenz, sei es in Magazinen, wie z. B. Bild der Wissenschaft, Spiegel, Focus, Handelsblatt, in Fernsehsendungen oder auch im Rahmen von Präsentationen und Gesprächen.
Schunk Powerball

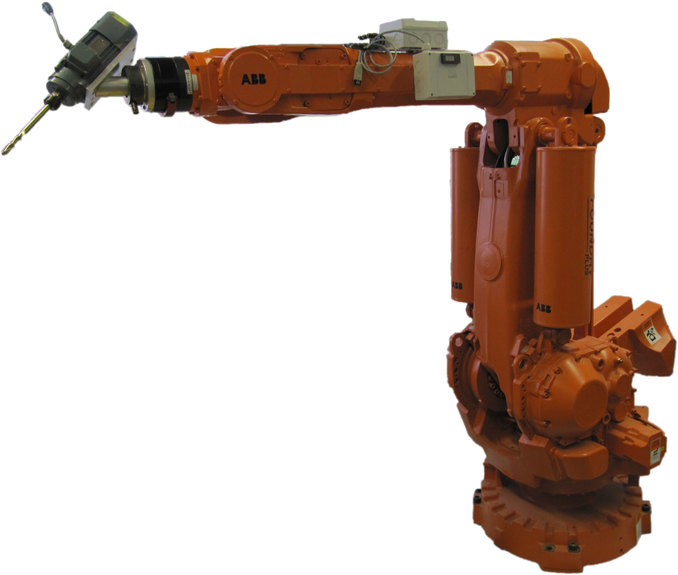
ABB IRB6400 M2000
Fanuc M-6iB

Fanuc Deutschland hat uns freundlicherweise ein topmodernes Bedientableau überlassen -Vielen Dank!
Der M-6iB wurde uns mit freundlicher Unterstützung von der Alfing Kessler Sondermaschinen GmbH gesponsort.
Precise Scara

Der Scara wurde uns mit freundlicher Unterstützung von der Schunk GmbH & Co. KG gesponsort.
Die moderne Steuerung verfügt über eine komfortable Web Anbindung.
ABB IRB140 M2000
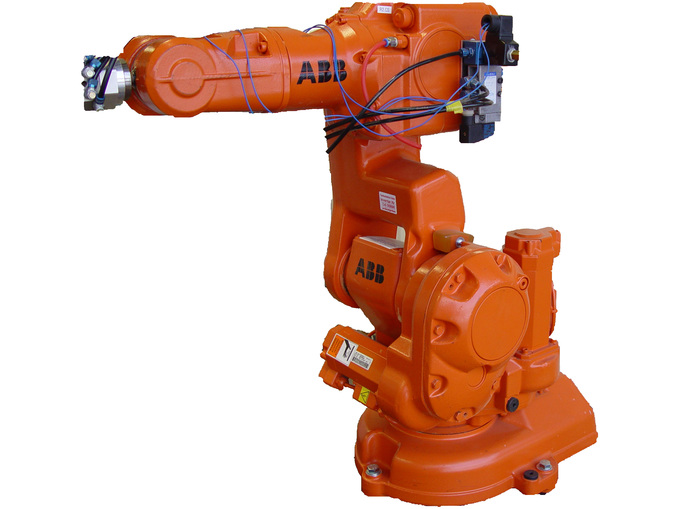
Das ist der kleine Bruder vom IRB6400 mit derselben Steuerung. Über seine digitalen Eingänge werden hier komplexe Greifaufgaben gelöst. Auch dient er zur Fräsbearbeitung von Hartschaumstoff.
Steinbichler Comet L3D

Der besonders kompakte und leistungsfähige 3D-Sensor STEINBICHLER COMET LƎD eröffnet als günstige Einstiegslösung eine neue Dimension für die effiziente 3D-Datenerfassung.
COMET LƎD arbeitet mit einer innovativen, wartungsfreien und zudem günstigen LED-Beleuchtungstechnologie mit langer Lebensdauer. Durch den neuen, einzigartigen LED-Puls-Modus sorgt die hohe Lichtleistung auch bei schwierigen Umgebungsbedingungen für hervorragende Messergebnisse. Das Sensorgehäuse mit der bewährten Ein-Kamera-Technik von Steinbichler sowie der komplette Messaufbau sind extrem kompakt und leicht konzipiert und können so mühelos transportiert werden.
COMET LƎD liefert eine exzellente Datenqualität und hochgenaue Messergebnisse und ist daher auch ideal für anspruchsvolle Anwendungen in der Qualitätskontrolle einsetzbar. Durch die optional erhältliche Steinbichler Photogrammetrie sind auch Messungen an sehr großen Objekten mit einer äußerst hohen Genauigkeit realisierbar.
Minolta VIVID-9i

Der Konica Minolta VIVID 9i ist der fortgeschrittenste 3D Scanner der VIVID Reihe. Der VIVID 9i ist ein Allroundgenie, mit dem man Objekte von äußerster Nähe oder größerer Ferne scannen kann - alles mit unglaublicher Exaktheit und Präzision Mithilfe des Dreibein-Standfußes ermöglicht der VIVID 9i Mobilität und Anpassbarkeit für qualitativere und variierendere Scans.
Der VIVID 9i, kombiniert mit dem PSC-1 Photogrammetry System, ist ein hochpräzises Scan-System, welches dazu imstande ist, genaue Oberflächen-Daten auszulesen, was mit anderen Scannern unmöglich wäre. Der VIVID 9i ermöglicht die Vielseitigkeit und Präzision, die nötig ist, um fast jeden Job zu erledigen.

Schlüsselfunktionen
- Accuracy of 50 microns (0.002 inches)
- Turntable accessory
- Captures color detail
- Photogrammetry PSC-1 system
- Three interchangeable lenses
Vorzüge
- Ideal for inspection
- Great for scanning small parts
- Use for texture mapping / visualization
- Removes tolerance stack
- Use for wide range of object size
Minolta VIVID-900

Die Minolta VIVID-900 ist ein 12 Kilo schwerer stationärer Scanner und ist auf einem Stativ im Labor gelagert. Er hat eine Genauigkeit zwischen 0,16 und 0,22 mm und ist in der Lage, Objekte von 10 cm bis 1m Größe zu scannen. Der Scanner ist in der Lage, Objekte innerhalb einer Entfernung von 60 cm bis 2,5 m zu scannen, während die beste Leistung des Scanners in dem 60 cm-Bereich dargestellt ist. Außerdem gibt es 3 verschiedene Wechselobjektive für die CCD-Kamera des Scanners.
Um die daraus resultierenden 3D-Daten zu optimieren, muss abhängig von der Größe des Objekts und der Distanz zwischen Scanner und Objekt, das richtige Objektiv ausgewählt werden. Die Minolta VIVID-900 folgt der Point-and-Shoot-System, d.h. der Bediener des Scanners fokussiert das Objekt, welches er scannen möchte und drückt auf die Taste, um das Objekt zu scannen. Der gesammte Scan-Prozess kann ohne einen Host-PC durchgeführt werden, indem der eingebaute Farb-LCD-Display benutzt wird. Der Display kann dazu verwendet werden, direkt zu fokussieren und um das ungefähre Ergebnis des Scans zu betrachten.
Die gescannten Daten können mit dem integrierten CF-Card-Slot auf einer CF-Karte gespeichert werden und separat im PC ausgelesen werden.

Professioneller 3D-Drucker
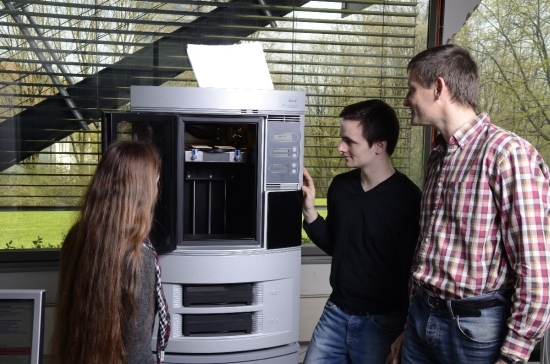
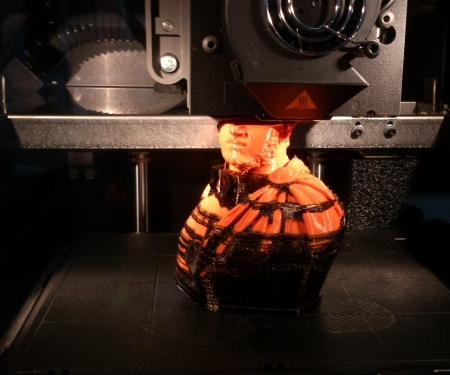
Professionelle 3D-Drucker: Stratasys 3D-Drucker bauen professionelle Bauteile direkt am Schreibtisch. Grundlage dafür ist die patentierte FDM- (Fused Deposition Modeling) Technologie, ein additiver Herstellungsprozess der dreidimensionale Objekte aus CAD-Daten Schicht für Schicht erzeugt. Das Ergebnis sind präzise, funktionelle Modelle, Prototypen und Endprodukte.
Die Besonderheit der Serie "Dimension Elite" liegt in der um 30% dünneren Schichtstärke beim Auftrag. Daraus resultieren dünnere Wandstärken und besser dargestellte Details und Oberflächen. Das Entfernen der Stützen erfolgt bei der Elite automatisch. Dazu wird das Modell samt Stützen in eine Cleanstation gelegt, in der warmes Seifenwasser umgewälzt wird, welches die Stützen vollautomatisch auflöst.
Die Druckergebnisse können u.A. folgende sein:
- Anschauungsmodelle
- Funktionsprüfungen
- Prototypen
- Produkt Mock-Ups
- Vorrichtungen
- Halterungen und Montagehilfen
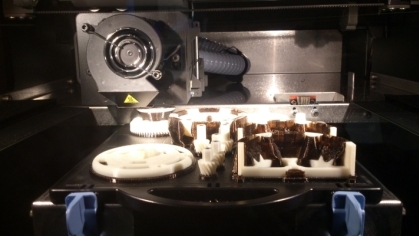
Der Bauraum des Druckers
Technische Daten (Dimension Elite)
| Bauraumgröße | B 203mm x T 203mm x H 305mm |
| Baumaterial | Thermoplast ABSplus |
| Farben | natural, weiß, schwarz, grau, blau, olivgrün, neongelb, rot, orange |
| Software | CatalystEX |
| Datenformat | STL |
| Layerstärke | 0,17mm und 0,25mm |
| Gewicht | ca. 130 kg |
| Abmessung | B 685mm x T 915mm x H 1045mm |
| Stromanschluss | 220-240V, 50/60Hz, 7A |
| Anbindung | Ethernet, IP-Adresse statisch oder dynamisch |
Auf einer Bauplattform entstehen Schicht für Schicht dreidimensionale Objekte von Gestaltung und Kunst bis zu funktionalen Maschinenelementen.

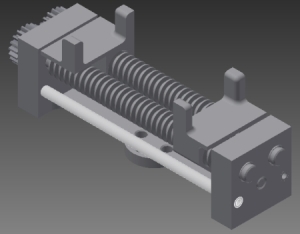
Aus einer Aufgabenstellung von Professor Berger: Veranschaulichte Getriebelehre im Rapid Manufacturing.
Im Rahmen der die Vorlesung "Konstruktion" begleitenden Übungen, entwickeln die Studierenden Robotergreifer, deren Funktion nach Ausdruck getestet wird.

Fraktales Element (orange), die stützende Struktur (braun) ist noch nicht ausgewaschen.