Wenn bewegliche Spiegel den Laserstrahl führenHochschule Aalen erhält hochmoderne Roboteranlage mit 3D-Scanner
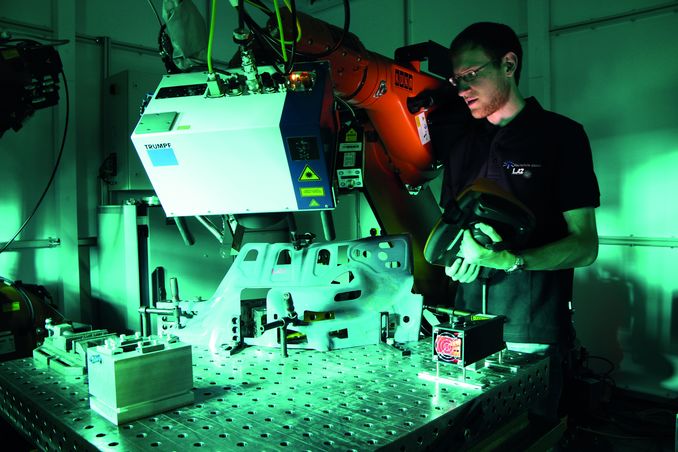
Markus Hofele, Doktorand am LaserApplikationsZentrum, richtet in der neuen Roboterzelle den 3D-Scanner aus. Der Bearbeitungskopf führt den Laserstrahl mittels beweglicher Spiegel über das Werkstück.
Das LaserApplikationsZentrum (LAZ) der Hochschule Aalen hat zwei hochflexible Sechs-Achs-Roboter von KUKA und einen 3D-Scanner der Firma Trumpf zur dreidimensionalen Laserbearbeitung von Bauteilen mit einem Gesamtwert von fast 400.000 Euro erhalten. Mit dieser modernen Anlage forschen die wissenschaftlichen Mitarbeiter des LAZ an berührungslosen Füge- und Oberflächenbearbeitungstechnologien auf komplexen 3D-Oberflächen.
Die beiden Roboter befinden sich in einer über 20 Quadratmeter großen Laserschutzelle mit modernster Sicherheitstechnik. Auf einem der Roboter ist ein 3D-Scanner der Firma Trumpf zur präzisen, schnellen und dreidimensionalen Bearbeitung von Bauteilen montiert. Der Scanner führt den Laserstrahl mittels beweglicher Spiegel hochdynamisch über das Werkstück. Eine Besonderheit ist dabei ein in den 3D-Scanner integriertes Pyrometer – ein Strahlungsthermometer, mit dem berührungslos die Temperatur im Laserspot gemessen und mit dem die Laserleistung mehrere zehntausend Mal pro Sekunde direkt geregelt werden kann. Dadurch lässt sich auf der Werkstückoberfläche die benötigte Temperatur für Füge- und Härteapplikationen exakt erreichen.
„Damit können wir speziell das innovative Laserstrahlkapillarspaltlöten voranbringen, bei dem der Laser als Wärmequelle genutzt wird“, sagt Markus Hofele, Doktorand am LaserApplikationsZentrum, „so kann die Energie hoch effizient und gezielt in die Bereiche des Werkstücks eingebracht werden, in denen sie benötigt wird“. Die Position des Roboters und des 3D-Scanners können miteinander verrechnet werden, sodass beide gleichzeitig bewegt werden und eine effiziente 9-Achs-Simultanbearbeitung komplexester Bauteilkonturen mit Freiformflächen möglich ist. Die aufwendige Steuerung der Roboter- und Scannerbewegungen wird bequem an einem Büroarbeitsplatz mittels CAD/CAM programmiert. Über eine direkte IT-Anbindung wird der Programmcode auf die Laserzelle übertragen.
Durch Wechseln der Bearbeitungsköpfe können die beiden Roboter auch für weitere Laserfertigungsverfahren eingesetzt werden. Beispielsweise wird im interdisziplinären und strategischen FH-Impulsprojekt „Smarte Materialien und intelligente Produktionstechnologien für energieeffiziente Produkte der Zukunft“ (SmartPro) untersucht, in wie weit die Klebfestigkeit im Leichtbau durch eine Laservorbehandlung der zu fügenden Materialien gesteigert werden kann.
Die Roboterzelle wurde innerhalb des Forschungsprojekts FlexLight4.0 („Flexibles Licht als Enabler von hochfunktionalisierten, adaptiven optischen Elementen und Sensoren für Realtime Messungen bei I4.0 Applikationen“) beschafft und wird vom Bundesministerium für Bildung und Forschung gefördert. In diesem Forschungsvorhaben wird eine komplette digitale Fertigungskette zur Herstellung von Bauteilen aus Metallen und Keramik aufgebaut werden, die auf Licht als Werkzeug mit flexiblen und anpassungsfähigen Eigenschaften basiert.