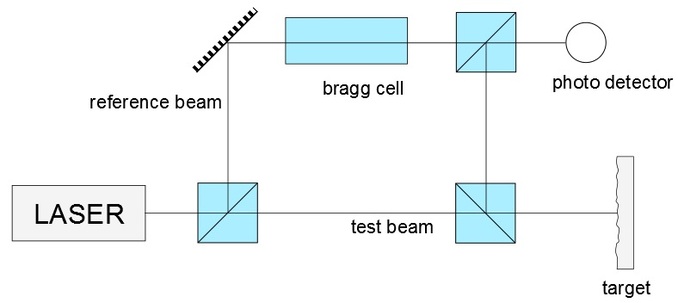
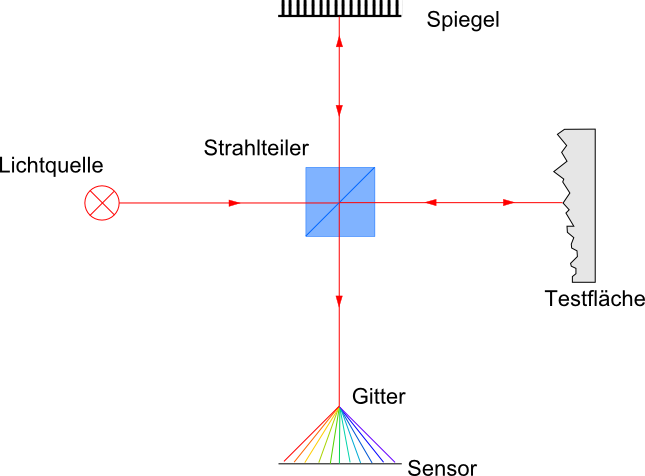
Bei einem Vibrometer wird der Laserstrahl zunächst in einen Referenz- und Messstrahl aufgeteilt. Die vom Objekt reflektierte Welle setzt sich aus der anfänglichen Frequenz und der Doppler-Frequenzverschiebung (Änderung der Lichtfrequenz durch Verschiebung des Objekts) zusammen ( fD = 2 v / λ ). Sie interferiert anschließend mit der Referenzwelle. Im Gerät wird dann die Doppler -Frequenzverschiebung des Interferenzmusters bestimmt, welche proportional zur Geschwindigkeit des Messobjektes ist.
Die "bragg cell“ bewirkt eine Frequenzänderung des Referenzstrahls von 70 Hz, was bei einem stillstehenden Objekt eine Modulationsfrequenz von 70 Hz am Fotosensor ergibt. Bewegt sich das Objekt nun zum Vibrometer, wird die Modulationsfrequenz erhöht, entfernt sich das Objekt, verringert sich die Frequenz ( fc(t) = fB + fD(t) = fB + 2 v(t) / λ ). So können Aussagen über die Bewegungsrichtung der Schwingung gemacht werden.
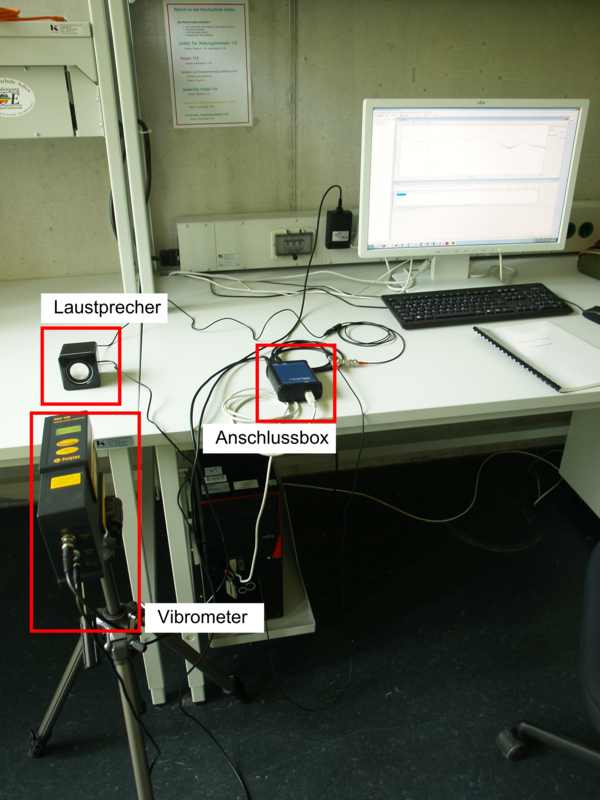
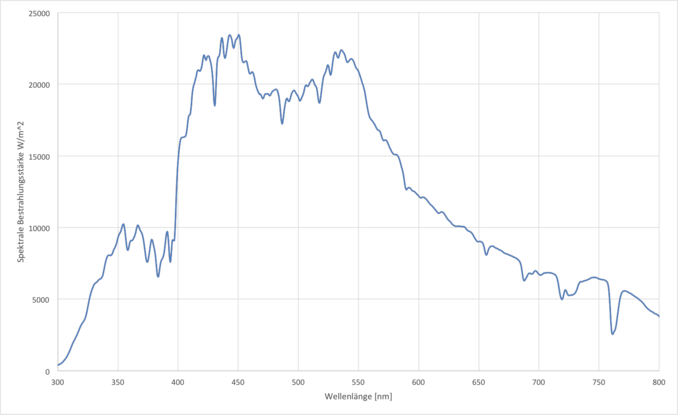
Das Laser-Doppler Vibrometer PDV 100 von Polytech deckt einen Frequenzbereich von 0,05 Hz bis 22 kHz ab und arbeitet mit einen Arbeitsabstand zwischen 0,1 m und 30 m. Dabei bleibt die Schwinggeschwindigkeitsauflösung immer besser als 0,05 µm/s. Das Gerät lässt sich somit für fast alle akustische Applikationen verwenden. Da das Programm auf einem Laptop verfügbar ist, sind auch Messungen vor Ort möglich.Mit dem Aufbau kann beispielweise die Qualität eines Lautsprechers beurteilt werden. Unten ist der Frequenzgang eines Lausprechers zu sehen, der weißes Rauschen wiedergibt.