Studienorientierung
Hier findest du einige Beispielaufgaben aus dem Studiengang Technische Informatik / Embedded Systems. Es wurden Aufgaben aus den Fachbereichen Elektrotechnik, Informatik und Mathematik zusammen gestellt, um dir zu zeigen, welche Grundlagenfächer dich im Studium der Technischen Informatik / Embbedded Systems erwarten.
Dabei ist zu betonen, dass dies nur ein kleiner Auszug aus dem gesamten Fachbereich ist, es warten noch viele andere spannende Aufgaben auf dich, die dir unsere Lehrende aber von Grund auf erklären werden.
Viel Spaß beim Ausprobieren!
Du möchtest mehr zum Studiengang erfahren?
Unter Informieren findest du mehr Informationen zum Studiengang, beispielsweise welche Fächer im Studiengang enthalten sind und was du mit dem Studium später machen kannst.
Und unter Bewerben findest du alle Informationen, um dich für Technische Informatik / Embedded Systems einzuschreiben.
Programmierung Saugroboter
Einleitung
Die Technische Informatik bildet die Schnittstelle zwischen Informatik und Elektrotechnik. Inhaltlich spielen vor allem technische Systeme eine Rolle, die sowohl aus Elektronik Hardware als auch aus dazugehöriger Software bestehen. Innerhalb solcher Systeme übernehmen häufig Mikrocontroller das Auslesen von Sensor-Daten, die Daten- und Signalverarbeitung sowie die Ansteuerung von Aktoren. Es werden die technischen Bestandteile von Informations- und Kommunikationssystemen entwickelt, integriert, produziert und betrieben.
Zielsetzung der Aufgaben:
Es soll ein Staubsaugerroboter programmiert werden. Der Arbeitsbereich des Roboters wird wie in Abbildung 1 gezeigt in quadratische Felder eingeteilt.
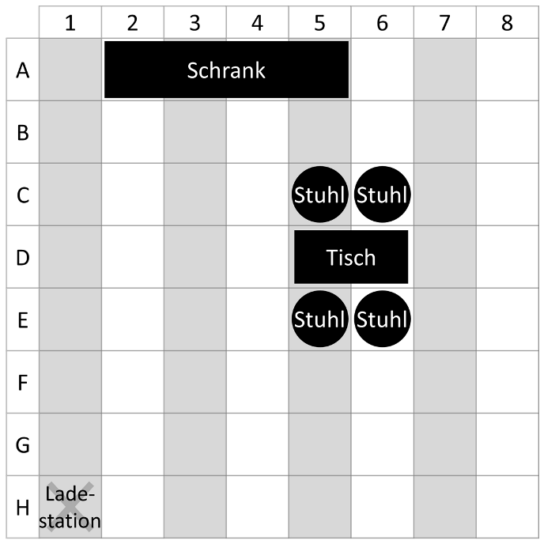
Abbildung 1: Der Arbeitsbereich des Staubsaugerroboters. Im Feld H1 steht die Ladestation. Die schwarz gezeichneten Elemente sind Hindernisse.
Der Staubsaugerroboter kann geradeausfahren sowie sich im Uhrzeigersinn nach rechts drehen. Die Richtung in die der Roboter ausgerichtet ist, wird, wie in Abbildung 2 zu sehen, mit einer Pfeilspitze angezeigt.
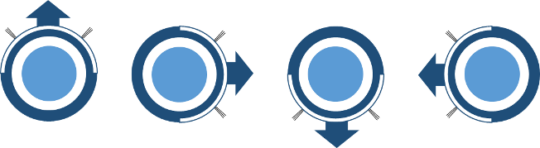
Abbildung 2: Schematische Darstellung des Staubsaugerroboters. Die Pfeilrichtung zeigt die Richtung an, in die der Roboter ausgerichtet ist.
Programmierer*innen verwenden die folgenden Befehle, um Programme für den Staubsaugerroboter zu schreiben.

Damit der Roboter nun die gewünschten Aktionen ausführt, muss für die jeweilige Aufgabe ein Programm geschrieben werden. Ein Programm ist eine Reihe von Anweisungen, die von oben nach unten ausgeführt werden. Der Roboter führt zuerst die oberste Anweisung aus, dann die zweite, usw., d.h. die Anweisungen werden sequentiell ausgeführt.
Aufgabe 1.1:
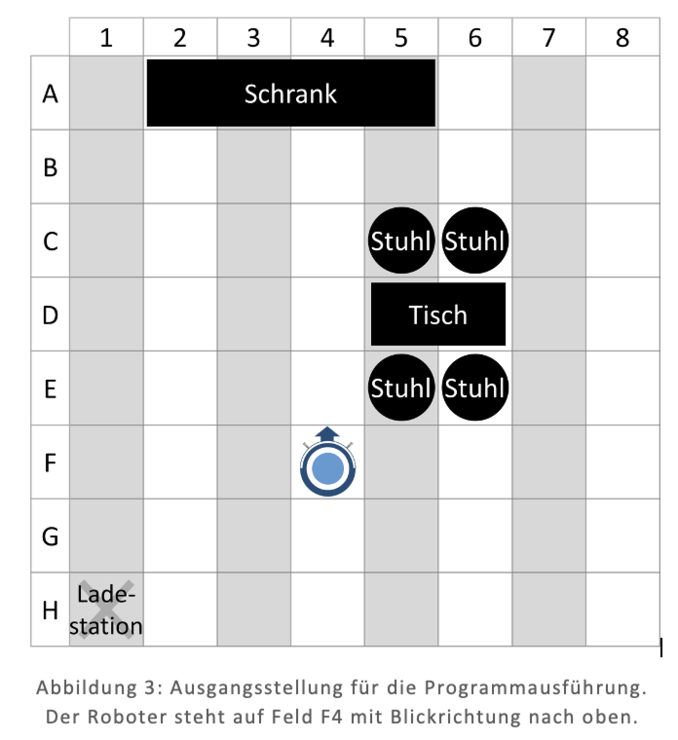
Ausgehend von der in Abbildung 3 gezeigten Ausgangsstellung, der Roboter steht auf Feld F4, wird das folgende Programm ausgeführt. Wo befindet sich der Staubsaugerroboter nach der Programmausführung? Gib die Koordinaten an.
fahre(3)
drehe(3)
fahre(2)
drehe(1)
fahre(1)
Die richtige Lösung lautet: Der Staubsaugerroboter befindet sich auf den Koordinaten B2.
Aufgabe 1.2:
Es soll nun, wiederum auf Basis der in Abbildung 3 gezeigten Ausgangsstellung, der kürzeste Weg zur Ladestation auf Feld H4 programmiert werden. Dabei soll nicht nur der kürzeste Weg gefahren werden, sondern zudem sollen so wenige Drehungen wie möglich ausgeführt werden.
Setze das Programm um.
Die Antwort lautet:
drehe(2)
fahre(2)
drehe(1)
fahre(3)
Einleitung
Symmetrische „Brückenschaltungen“ haben in der Elektrotechnik eine große Bedeutung.
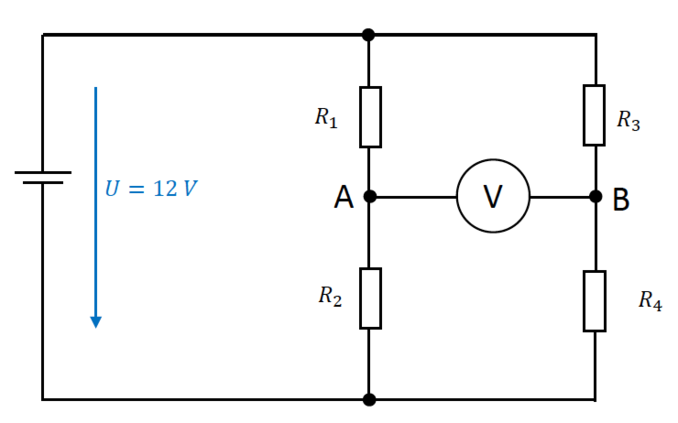
Symmetrische Brückenschaltung
Zwischen den Punkten A und B kann nur ein Strom fließen, wenn die Punkte A und B einen Potentialunterschied aufweisen.
Die Potentiale an den Punkten A und B werden über die jeweiligen Spannungsteiler hervorgerufen.
Man erhalt gleiches Potential an den Punkten A und B, wenn das Widerstandsverhältnis
Formel Widerstandsverhältnis
ist. Man spricht dann von einer symmetrischen Schaltung.
Aufgabe
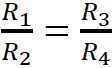
Eine Alarmanlage arbeitet nach dem Ruhestromprinzip.
Wird die Kontaktschleife unterbrochen, ist die symmetrische „Brückenschaltung“ nicht mehr abgeglichen und durch die Hupe fließt ein Strom.
Unterbrechung der Kontaktschleife bei der symmetrischen Brückenschaltung
Frage:
Auf welchen Wert muss R4 eingestellt werden, so dass die Hupe bei intakter Kontaktschleife stromlos ist?
Antwortmöglichkeiten:
a) 25 Ω
b) 400 Ω
c) 175 Ω
Die richtige Antwort lautet: a) 25 Ω
Was haben Gesichtserkennung, autonomes Fahren und Empfehlungssysteme gemeinsam? Mathematik ist überall. Unter anderem wäre die Entwicklung Künstlicher Intelligenz und damit Bilderkennung ohne Mathematik gar nicht möglich.
Um die mathematischen Modelle hinter KI zu verstehen, spielen Themen wie Vektorrechnung, Matrizen, lineare Algebra, mathematische Optimierung und Statistik die Hauptrollen. Im nächsten Beispiel werden wir sehen, wie Convolutional Neural Networks (CNN oder ConvNet) funktionieren und wie Vektoren und Matrizen dabei Anwendung finden.
Convolution:
Ein Convolutional Neural Network, auf Deutsch „faltendes neuronales Netzwerk“, ist ein künstliches neuronales Netz. Es handelt sich um ein von biologischen Prozessen inspiriertes Konzept im Bereich des maschinellen Lernens. Convolutional Neural Networks finden Anwendung in zahlreichen Technologien der künstlichen Intelligenz, vornehmlich bei der maschinellen Verarbeitung von Bild- oder Audiodaten. CNNs erreichen eine Fehlerquote von 0,23% auf eine der am häufigsten genutzten Bilddatenbanken, MNIST! Mögliche Anwendungen der Bildklassifizierung sind z.B. Erkennung von Tumoren auf medizinischen Scans, Online-Bildsuche, oder autonomes Fahren.
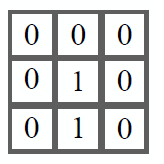
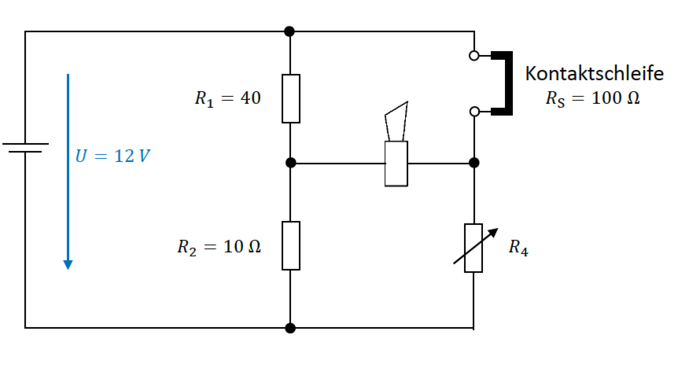
Bilder bestehen aus Pixeln:
Zunächst betrachten wir Schwarz-Weiß Bilder wie dieses mit dem weißen “Pi”:
Jedes Pixel nimmt den Wert 0 oder 1 an; hier 0 schwarz, 1 weiß. So können wir Bilder durch Matrizen repräsentieren.
Nehmen wir an, dass wir auf Bildern den isolierten weißen Punkt erkennen möchten.
Die folgenden Aufgaben sollten uns dabei helfen.
Aufgabe 1
Erst nehmen wir ein einfaches Beispiel: ein 1D-Bild (ECG data oder im Allgemeinen time series data können z.B. als 1D Bilder modelliert werden):

Unser Ziel ist es, die alleinstehende 1 zu erkennen. Lasst uns einen bestimmten Filter (Feature
detector) der Größe 3 definieren mit den Gewichten -1, 1 und -1:
Wir legen den Filter über die ersten drei Pixel, multiplizieren die Gewichte paarweise mit den entsprechenden Werten, addieren die Produkte zu einem gemeinsamen Wert und setzen das Ergebnis an die richtige Stelle in der Ausgabe-Merkmalskarte (siehe Abbildung). Anschließend verschieben wir den Filter um einen Pixel nach rechts. Bei vollständiger Durchführung durch das ganze Bild dieser Operation spricht man von einer Convolution (Faltung). An den Rand des Bildes wird jeweils eine 0 angehängt.
Interessant sind immer die relativ hohen Werte, deshalb wenden wir nun die sogenannte RELU Funktion an, die für negative Eingaben null und für positive Eingaben eine Identität ist. Diese Funktion gibt eine Null zurück, wenn sie eine Negative Eingabe empfängt, sonst lässt sie die Werte unverändert.
Können Sie erkennen, was der Filter macht?
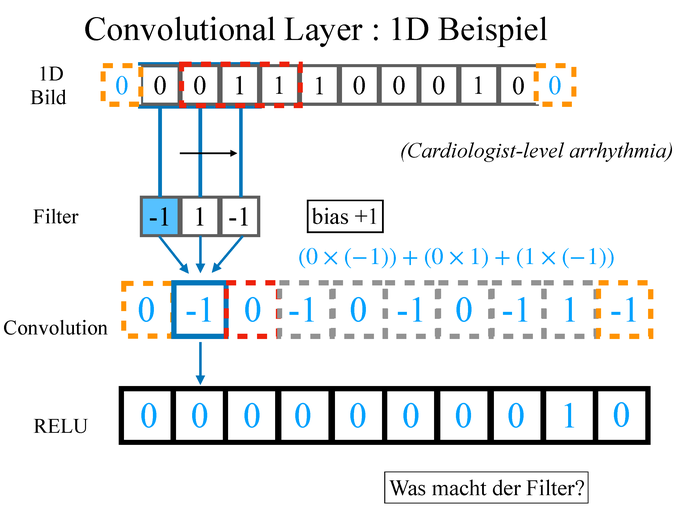
Der Filter findet die isolierte 1.
Aufgabe 2
Rechnen Sie die Convolution (anschießend RELU) mit diesem 2-dimensionalen Filter mit dem Bild von “Pi” aus. Was macht der Filter?

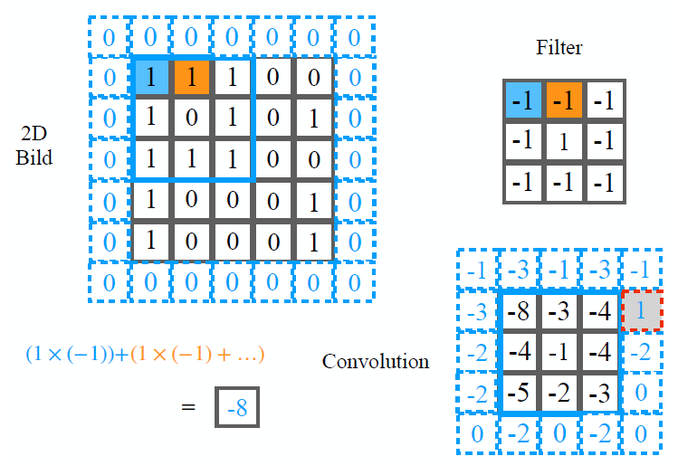

Der Filter findet den isolierten Punkt!
Aufgabe 3
Welcher Filter würde den Buchstaben i (ohne den Punkt) finden?